Choosing between more or less accuracy has never been much of a consideration (or an option), historically. The specified requirement has predominantly been “The most! Our device requires the most precise accuracy available.” But today, considering the options, it’s fair to ask: how much accuracy does your device or application need, really?
With RTK came the phrase “addiction to accuracy”. Establishing the subsequent adoption of GNSS receivers to commercial applications – 1cm accuracy was achieved. The forecast benefits for agriculture were immediately realized. Successive swaths over crops no longer had overlap or underlap, improving precision while saving time and diesel fuel. Tractor tires and steering could be guided between crop rows, allowing for seeds to be planted closer together, increasing the crop yield. Pest management programs improved with the adoption of spot treatments (over a blanket approach), ultimately saving costs, with the more precise management of expensive pesticides.
GNSS as a utility was then further developed. Depending on the positioning technique that a positioning engine or GNSS receiver used, accuracies were described by horizontal spread in centimeters, and 2cm accuracy became the golden standard, written into the requirements of many applications. But for a pedestrian use case, what is the technical return on investment for accuracy and what is considered overkill? With the technology and infrastructure, it is arguable to say accuracy worse than 5 meters in most cases is dismissed as being as good as 100 meters.” Instead of asking how much accuracy is really needed, perhaps a better question would be “How would you use more accuracy?”
Take the classic GPS experience: “You have arrived at your Destination”, for example. These GPS devices served us well (for the most part), navigating us through unknown neighborhoods and alleviating our minds of recalling the exact order of left and right turns ahead. GPS allowed drivers to concentrate on driving, and getting lost was no longer an excuse for being late. Even if we missed the turn, the friendly voice let us know it was “recalculating” the route, making the navigational transgression solvable on the fly. Spontaneous trips into an unfamiliar city or neighborhood were now made confidently, and comfortably. But on its inception, this GPS technology delivered accuracies of just tens of meters. Arrival was declared a little late or early and, at worst, there may have been some critical moments when notified to make a turn…immediately.
Tens of meters of accuracy? How were we still successful with this? Well, our built-in human resources were relied on to take care of the finer details of the trip. Once we could see the destination we could simply park or walk over to it. The two positions relative to each other were the vehicles and the locations. Did it matter if the position said we were at the entrance gate even though we still had about 25 steps to get there? Not really. We still got there.
Then, on the other hand, there’s surveying. Identifying the exact point on the surface of the planet where the corner of a large building should be located brought legal implications with right of way, and boundary disputes between adjacent neighbors. Land ownership was quantified by boundaries established. The Certified Land Surveyor made this boundary physical with an iron property stake driven into the ground within 2.5 centimeters. With an Iron stake actually being ~ 2.5cm in Diameter, there is little point (pun intended) in 1mm accuracy.
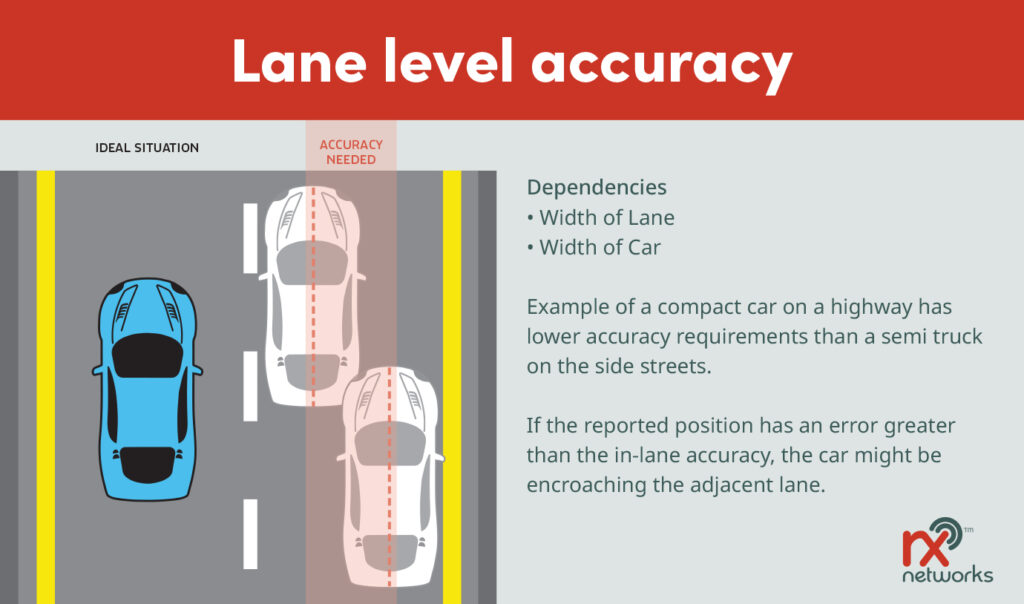
How about lane level accuracy…a term used to describe the accuracy needed for autonomous vehicles and other vehicle tracking applications? The two objects that need to be positioned relative to one another are the car and the lane it’s intended to be traveling in. The average width of a car is 6.5 ft or 2m. The average width of a highway car lane is 12ft, or approximately 4m. To keep this error budget example simple, assume these figures apply to all cars and all roads. Given these parameters we can estimate the car’s position may have a cross-track error of 1m, assuming the GNSS antenna on the car is right in the middle of it. Knowing that we are safely in the lane (need) is different from knowing where we are in the lane or where we are in the car in the lane (could be more of a want than a need).
In each of the examples discussed here GNSS data corrections may have been needed for the device to compute the required position accuracy. There is a critical level of accuracy that contributes to the intended outcome. This level is indeed different based on what the positioning is used for. After this point, the extra accuracy may not be making any other technical contributions to the overall solution. Given that the complexity of the corrections service has a direct impact on accuracy and cost, hopefully this post helps in identifying the right corrections service to be streamed into your receiver.